INTRODUCTION
Over the past several decades, simulators have become popular in many fields as a means of teaching complex or advanced skills. Using a simulator, skills can be practiced in an environment that is safe, allowing the student to learn from errors without negative real-life consequences. The student can quickly gain experience with repeated trials in scenarios that can be manipulated by the trainer to simulate various hazardous or complicated situations. This allows the student to quickly learn how to master higher order skills such as scanning their environment more effectively, handling higher workloads, identifying critical information and making better decisions quickly.
Based on the long-established and successful application of simulator-based training in the aviation industry, researchers have investigated the application of simulator based training for drivers (Blickensderfer et al., 2005; Pradhan, Pollatsek, Knodler, & Fisher, 2009; Romoser & Fisher, 2009; Pollatsek, Romoser & Fisher, 2012).
Many administrators of truck training centers have considered and some have tried using truck simulators in their operations. However, the majority of truck driver training centers still operate without simulators. One potential reason for this is that the technology has not been implemented correctly. The successful transition from the academic or simulator company research laboratory to real life is rarely as easy as shipping the simulator from the lab and to the practitioner. Often the technology that was developed and tested in the lab is not immediately suitable for use or the end users are insufficiently trained to operate the simulator or understand the data it collects Before simulation technology can be translated for use in practice, careful consideration must be given to contextual factors such as the goals of the organization, the expectations and expertise of the users, the operating budget, the environment the simulators will be used
in, and how performance data will be utilized.
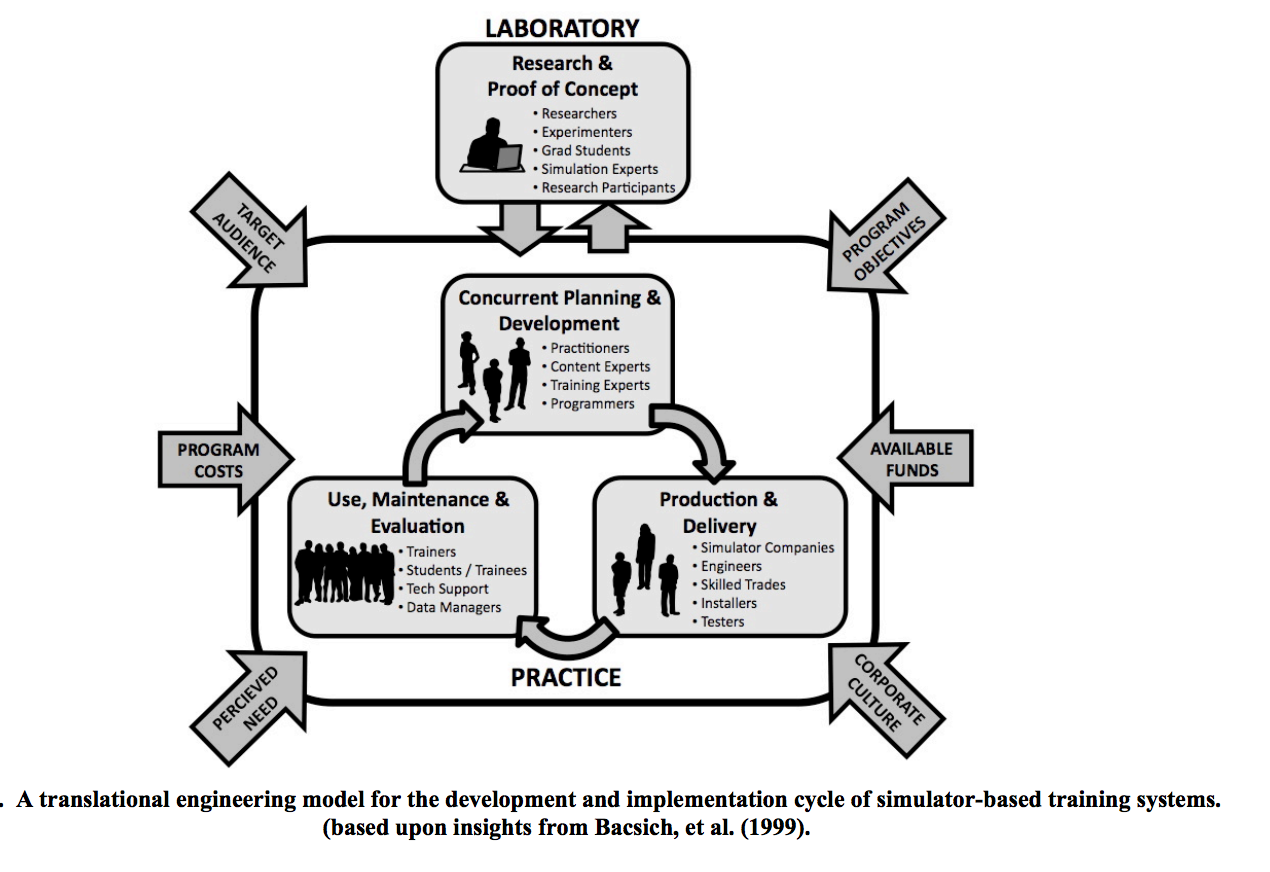
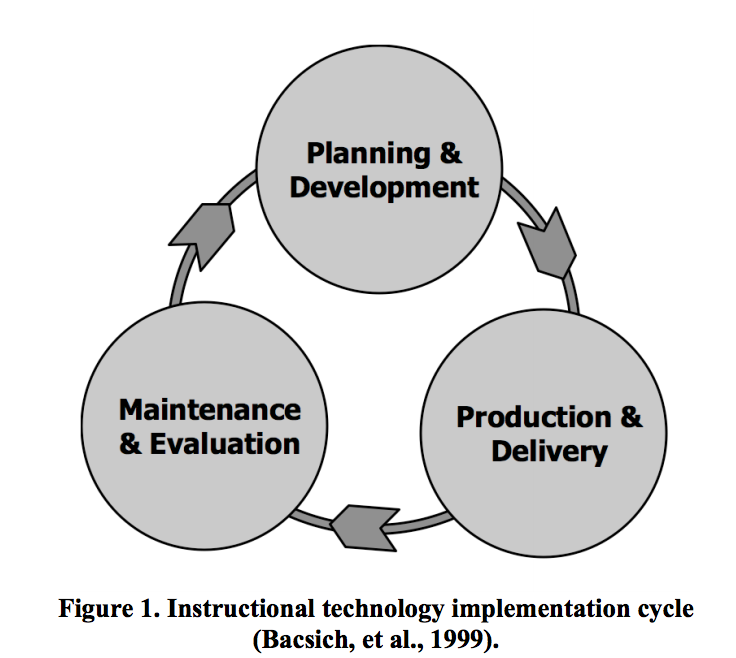 As with any new technology, instructional simulators have an implementation cycle that must be understood and respected. To help visualize this cycle, Bacsich, et al. (1999) developed a three-phase working model for instructional technology development and implementation (Figure 1). This three-cycle model was originally designed to help the people involved in making economics decisions better understand the costs of developing instructional technology. However, we believe this model also provides an excellent starting point from which to begin discussing the design and human-factor challenges associated with how to translate simulator-based instruction that is developed and tested in the laboratory to real world practice. In the present paper, we expand upon the model of Bacsich et al., and illustrate with references to a real-world case study how this model has been successfully applied to the translation of simulator-based instruction from the laboratory to a fully operational truck driver training center.
As with any new technology, instructional simulators have an implementation cycle that must be understood and respected. To help visualize this cycle, Bacsich, et al. (1999) developed a three-phase working model for instructional technology development and implementation (Figure 1). This three-cycle model was originally designed to help the people involved in making economics decisions better understand the costs of developing instructional technology. However, we believe this model also provides an excellent starting point from which to begin discussing the design and human-factor challenges associated with how to translate simulator-based instruction that is developed and tested in the laboratory to real world practice. In the present paper, we expand upon the model of Bacsich et al., and illustrate with references to a real-world case study how this model has been successfully applied to the translation of simulator-based instruction from the laboratory to a fully operational truck driver training center.








